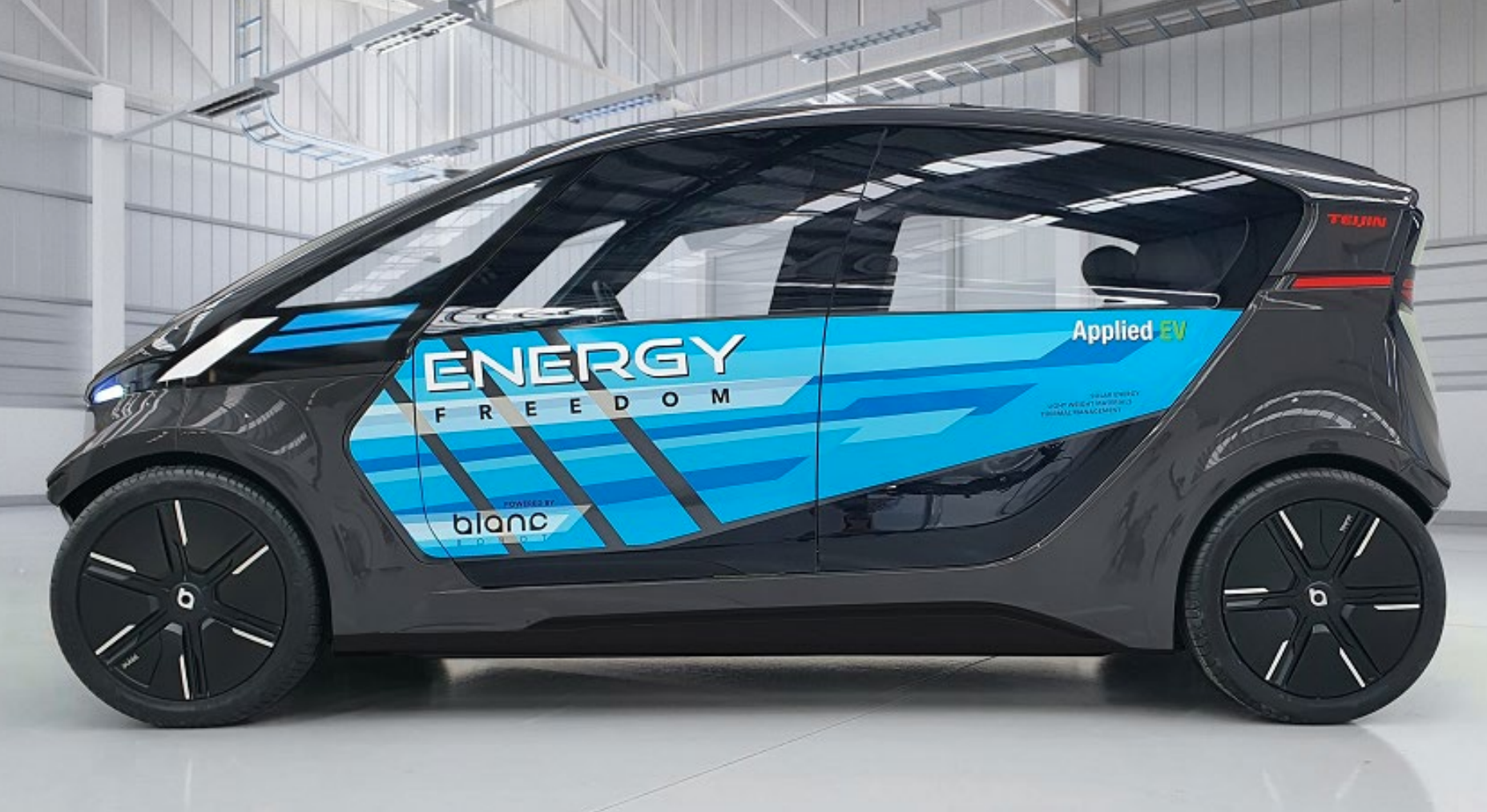
帝人とオーストラリアのApplied EV(AEV)は3月30日、2019年から共同開発している低速電気自動車(LS-EV)のプロトタイプを発表した。自動走行が可能な車種で、両社が目標としてきた歩行者レベルの消費エネルギーとほぼ同等。自動走行車としては過去最高レベルのエネルギー効率を実現した。
両社は、「Well to Wheelゼロエミッション」というテーマを掲げ、今回、自動走行が可能な多目的LS-EV向けプラットフォーム「Blanc Robot」、および当社のポリカーボネート樹脂「パンライト」製のグレージングを表層に用いた太陽電池搭載のLS-EV向けルーフを開発。帝人の軽量・高強度素材、加工に関する最先端技術、成形ノウハウと、AEVのLS-EVの基本設計や、低エネルギーでの駆動・制御などに関する技術を最適条件で組み合わせた。
発表されたプロトタイプは4人乗り。ルーフには、太陽光発電パネルと軽量な給電モジュールを搭載し、オーストラリアの日照条件下での試験で、一般的な太陽光発電パネルと同等の約330Wを記録した。
【参照ページ】豪AEV社とLS-EVプロトタイプを共同開発
ここから先は登録ユーザー限定のコンテンツとなります。ログインまたはユーザー登録を行って下さい。
帝人とオーストラリアのApplied EV(AEV)は3月30日、2019年から共同開発している低速電気自動車(LS-EV)のプロトタイプを発表した。自動走行が可能な車種で、両社が目標としてきた歩行者レベルの消費エネルギーとほぼ同等。自動走行車としては過去最高レベルのエネルギー効率を実現した。
両社は、
ここから先は登録ユーザー限定のコンテンツとなります。ログインまたはユーザー登録を行って下さい。
帝人とオーストラリアのApplied EV(AEV)は3月30日、2019年から共同開発している低速電気自動車(LS-EV)のプロトタイプを発表した。自動走行が可能な車種で、両社が目標としてきた歩行者レベルの消費エネルギーとほぼ同等。自動走行車としては過去最高レベルのエネルギー効率を実現した。
両社は、
ここから先は登録ユーザー限定のコンテンツとなります。ログインまたはユーザー登録を行って下さい。
ここから先は有料登録会員限定のコンテンツとなります。有料登録会員へのアップグレードを行って下さい。
帝人とオーストラリアのApplied EV(AEV)は3月30日、2019年から共同開発している低速電気自動車(LS-EV)のプロトタイプを発表した。自動走行が可能な車種で、両社が目標としてきた歩行者レベルの消費エネルギーとほぼ同等。自動走行車としては過去最高レベルのエネルギー効率を実現した。
両社は、「Well to Wheelゼロエミッション」というテーマを掲げ、今回、自動走行が可能な多目的LS-EV向けプラットフォーム「Blanc Robot」、および当社のポリカーボネート樹脂「パンライト」製のグレージングを表層に用いた太陽電池搭載のLS-EV向けルーフを開発。帝人の軽量・高強度素材、加工に関する最先端技術、成形ノウハウと、AEVのLS-EVの基本設計や、低エネルギーでの駆動・制御などに関する技術を最適条件で組み合わせた。
発表されたプロトタイプは4人乗り。ルーフには、太陽光発電パネルと軽量な給電モジュールを搭載し、オーストラリアの日照条件下での試験で、一般的な太陽光発電パネルと同等の約330Wを記録した。
【参照ページ】豪AEV社とLS-EVプロトタイプを共同開発
ここから先は登録ユーザー限定のコンテンツとなります。ログインまたはユーザー登録を行って下さい。